Entradas del blog
El blog lo actualizamos poco, pero ¡seguimos vivos! :)
-
Ideas para competiciones de robótica 🤔
Indagando en la historia del CRM hemos encontrado en ChampionBot 2001 unas ideas muy guays para competiciones de robótica que compartimos con vosotros:
- Juego de las Sillas Al ritmo de la música, los robots se irán moviendo alrededor de una zona Circular, la cual dispondrá de unos pequeños recintos (“sillas”) en los cuales deberá meterse cada robot cuando la música deje de sonar. Como la detección de la música puede resultar muy complicada, entre otras cosas por el ruido ambiente, se propone sincronizar la parada de la música con el apagado de una luz potente (foco que alumbra toda la zona mientras la música esté sonando). El robot debe detectar este evento e intentar rápidamente entrar en uno de los recintos. Al final de cada uno, habrá otro foco de luz (bombilla) y un sensor de contacto que será pulsado por el robot con el fin de apagar la luz encendida, acto que será interpretado como “el robot se ha sentado en la silla y por tanto, sigue jugando”.
 />
/>-
Slalom Consiste en seguir a la mayor velocidad posible un camino señalizado por balizas. Las balizas estarán implementadas bien por infrarrojos o emisores de luz (bombillas) y determinarán un camino en zig-zag que deberá respetar el robot participante. La competición se podrá realizar con varios robots en paralelo, siempre teniendo en cuenta el correcto aislamiento entre cada uno de los recorridos, con el fin de evitar las posibles interferencias entre las balizas.
-
Campo de Minas En un entorno tal como un tablero tipo ajedrez adaptado a las dimensiones de los robots, se colocará en el centro de cada casilla un globo, el cual estará sujeto al tablero. El juego consiste en que 2 equipos comenzando cada uno a un lado del tablero, tienen que conseguir explotar el mayor número de globos posibles que estén colocados en la casilla del color correspondiente, y defender los globos de su color para que el equipo contrario explote pocos. Puede llegar a ser una prueba muy explosiva. Se pueden aplicar muchos tipos de algoritmos, desde ir a noquear al contrario, hasta proteger tus globos, pasando por el robot que se dedica a explotar los que le tocan y nada más. ¡Más le vale a los robots participantes ir protegidos!
-
La Batalla El campo de batalla está dividido en dos zonas, una blanca y una negra, cada una es el territorio de un equipo. El objetivo de la prueba es invadir el territorio enemigo con el mayor número posible de robots e intentar que el enemigo no penetre en nuestra zona. Transcurrido un tiempo, ganará el equipo que más robots tenga en el campo enemigo. Inicialmente cada equipo se situará en su campo correspondiente, a una cierta distancia de la frontera, adoptando la “formación de combate” o defensiva que más estimen oportuna.
-
Lucha con Lanzas La idea es realizar un gran torneo medieval con robots. Donde se enfrenten utilizando el ingenio, y no solamente la fuerza y el agarre. Lo primero es describir al tipo de robots que participan en esta prueba. Cada robot va a ir montado por un “jinete”, que es un cubo de cartulina, dicho cubo ira sujeto por un trozo de velcro. Cada robot irá provisto de una lanza que podrá asomar fuera de la montura (robot). Con esta lanza es con la que podrá derribar al jinete contrincante. Cada jinete podrá defenderse con un escudo. Tanto el escudo como la lanza podrán ir montados en sistema móvil, como un servo. El torneo se desarrollará de la siguiente manera: cada robot rastreará una línea negra, que será su carril, cuando tenga al alcance al otro robot intentará derribar al jinete del robot contrincante. Las normas son sencillas, el robot que pierda su jinete queda eliminado.
-
El Castillo Esta prueba tiene un cierto parecido al sumo, el área de juego es una mancha negra sobre un fondo blanco. Uno de los equipos debe defender el castillo, mientras que el equipo contrario ataca. Hay un tiempo máximo de juego, durante el cual el equipo atacante puede puntuar introduciendo a sus robots dentro del castillo y permaneciendo estos dentro durante un tiempo mínimo. La forma de puntuar puede ser, por ej. 1 punto por robot introducido, 3 puntos si 2 robots toman a la vez el castillo, 6 puntos si lo hacen 3 a la vez… Por otro lado, los que defienden obtienen puntos por evitar que un robot entre en el castillo y por echar a uno introducido sin permitirle marcar. En cada partida hay dos tandas, en la primera el equipo atacante es el defensor de la segunda tanda, y viceversa.
-
La Caza del Zorrobot El objetivo del juego es que una serie de participantes busquen y encuentren al robot “zorro”, el primero que llegue es el que gana. El zorro es un robot robusto que llevará en la parte superior un emisor de infrarrojos que emitirá una portadora cada cierto tiempo. Dispone de bumpers en todo su contorno de tal forma que puede detectar cuando algo choca contra él. El microbot que primero encuentre al zorrobot tocará un bumper que al activarse cancelará la emisión de la portadora. SERÍA EL GANADOR y recibe el máximo de puntos. Habrá un juez que manualmente retirará al microbot del zorrobot para liberar el bumper y así dar una nueva posibilidad de que otro participante lo encuentre.
- Juego del Pañuelo Inicialmente, se disponen dos grupos de robots con el mismo número de integrantes, uno frente a otro, a la misma distancia de un elemento que representa el pañuelo. Cada robot tiene asignado un código o número. Tras una señal “emitida” por el pañuelo o por el juez que identifique a uno de los robots, cada robot deberá ir al lugar donde está el pañuelo, accionar un bumper y volver a su lugar de origen antes de que el otro robot lo consiga, en este caso el robot que no accionó el bumper queda eliminado. Si durante el retorno a “casa”, el robot que no ha accionado el bumper alcanza al robot que sí lo hizo, el descalificado será el que accione el bumper.
Nos encantan estas ideas y os animamos a organizar vuestra propia competición ¡Como más se aprende es enseñando! :)
-
🤖Nuevo Mini Taller: Robotiza tu casa con Home Assistant🦾
Aprende a domotizar tu casa con seguridad y privacidad gracias al software libre ¡y además verás una demostración real!
¿Cuando? JUEVES 15 DE DICIEMBRE DE 2022, unos 45 minutos, tres opciones:
- a las 13:00 para turnos de mañana🎉
- a las 15:00 para turnos de mediodia🎉
- a las 18:00 para turnos de tarde🎉
¿Donde? Club de Robótica @ Planta baja del Edificio B (EPS-UAM). No es necesario apuntarse! Pero inscríbete y podrás utilizar el local: https://crm.ii.uam.es 🌟
¡Apúntatelo y no te pierdas esta oportunidad!
-
Bienvenida a la UAM
¡Comienza un nuevo curso y queremos daros la mejor bienvenida a nuestra querida universidad!
Si tienes proyectos de robótica y hardware ¡el CRM es tu asociación! Tenemos un taller y herramientas a tu plena disposición. Estamos en el local B111 (planta baja edificio B). Inscríbete y únete a nuestro grupo de Telegram para tener toda la información.

¡¡Bienvenid@s!!
-
OSHWDem 2018
Este año hemos vuelto a participar en la Open Source Hardware and Software Demonstration (OSHWDem), el evento nacional por excelencia que tiene lugar en La Coruña desde 2012. Batimos nuestro propio récord, fuimos 7 estudiantes gracias a la financiación de la Universidad Autónoma de Madrid a la que hemos representado orgullosamente con nuestras nuevas camisetas [vídeo del proceso de fabricación].


Equipo CRM-UAM: Telnet, Cristian, Edu, David, Carlos, Andrés y JackpotLos proyectos que llevamos fueron: OpenReflow: Un horno de soldadura de circuitos desarrollado por el club para montar componentes electrónicos de forma rápida y eficiente, OSHWaldo: Una nueva versión de Romualdo, nuestro robot interactivo que habla con las personas aplicando técnicas de reconocimiento facial y síntesis de voz. También llevamos uno de nuestros robots educativos Phogo.
En cuanto a competiciones, participamos en la categoría “Combate” con el robot Cuñaobot 2.0 esta vez actualizado y pilotado por David Ramírez [vídeo del mejor momento], aunque este año no conseguimos clasificar porque el nivel fue muy alto. En la categoría “Siguelíneas”, Cristian Tatu presentó la versión mejorada de su robot VisionRace que utiliza una cámara y visión artificial para seguir la línea, y obtuvo el segundo premio.
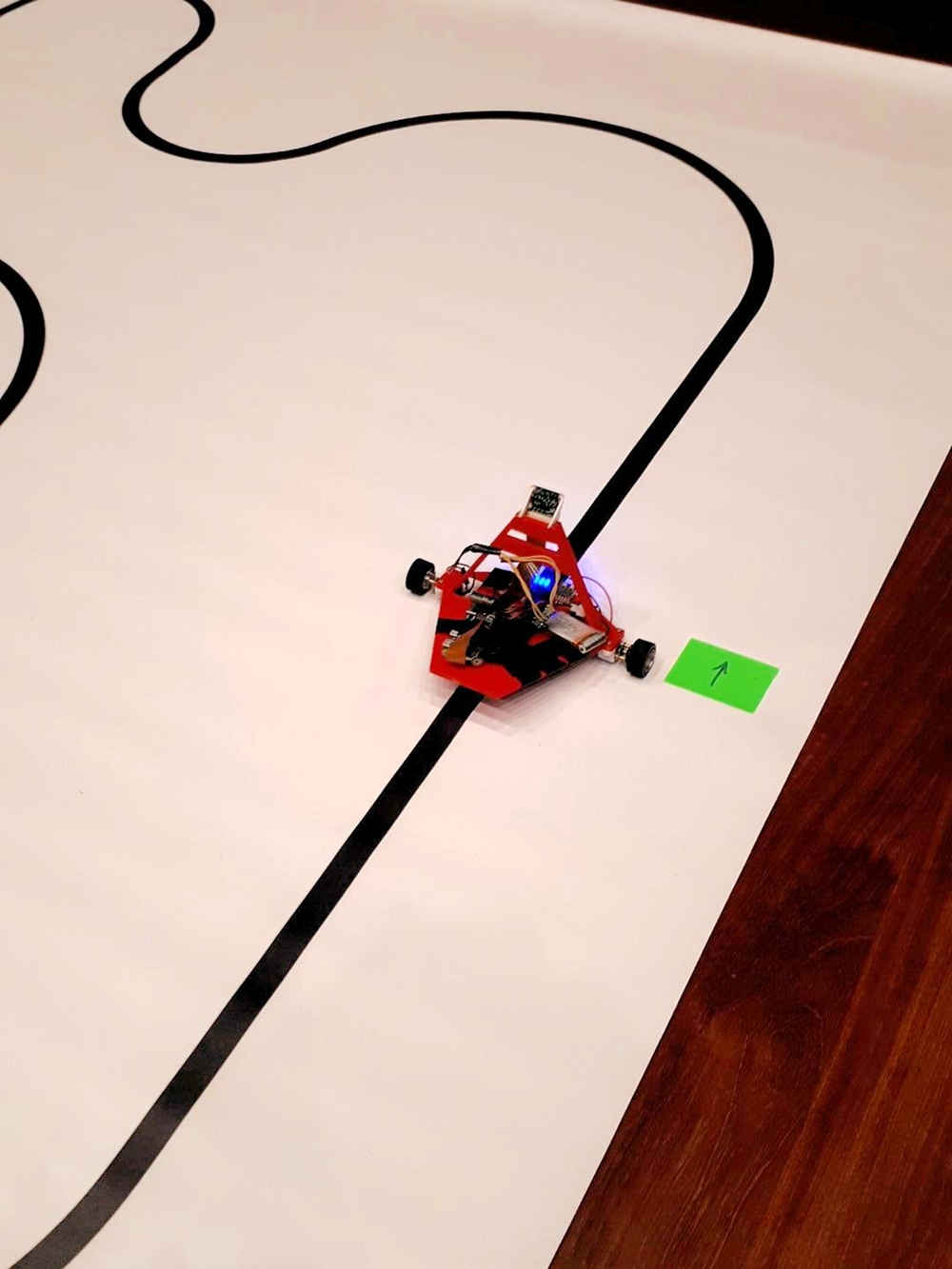

El robot de Cristian es muy novedoso: los siguelíneas habituales utilizan sensores situados bajo el robot, pero usar una cámara le permite detectar la línea mucho mas lejos para anticiparse a las curvas.
También participamos en el reto CloneWars 2018, que ha movido a makers de toda España para imprimir cientos de engranajes 3D y formar un precioso mosaico.
Desde el Club de Robótica llevamos nuestro propio engranaje representando a la Universidad Autónoma de Madrid. Lo hemos subido a un repositorio de GitHub.
La OSHWDem ha vuelto a ser el gran evento del año, motivándonos para seguir adelante ¡¡muchas gracias a todos los participantes y a la organización de BricoLabs!!
-
OSHWDem 2016

Un año mas hemos vuelto a participar en la OSHWDem (http://oshwdem.org), que ha tenido lugar el sábado 5 de noviembre en A Coruña, Galicia. OSHWDem (Open Source Hardware Demonstration) es el mayor evento de robótica, electrónica y programación Open Source de España. La principal diferencia con otros eventos similares, es que en este se fomenta especialmente que los proyectos sean colaborativos y estén publicados de manera abierta. Es decir, promueven el Open-Source y la formación de comunidades “maker” activas. Por ello, ¡no podíamos perdérnoslo!

Este año nos juntamos un grupo de 6 personas para ir como representantes de la Universidad Autónoma de Madrid. Además de participar en varias competiciones de robótica, llevamos un stand para enseñar nuestro proyecto Phogo, que diseñamos recientemente para un taller de robótica y programación organizado por la oficina de Atención a la Diversidad de la UAM. Los robots disponen de un rotulador y son muy fáciles de usar para la gente que está aprendiendo a programar, por lo que resultó muy atractivo para las personas que visitaron nuestro stand.
Puedes escuchar una breve entrevista de Juan Manuel Almuedo (Cole) a nuestros compañeros Carlos González “Chache” y Eduardo Hilario sobre el proyecto Phogo.
En cuanto a las competiciones de robótica, tras la experiencia de Robolid en abril de 2016, no imaginábamos el éxito que tendríamos esta vez:

- Obtuvimos el primer premio con el robot Vector9000 en la categoría de Velocistas (donde hubo mas de 20 participantes).
- Obtuvimos el segundo premio con el “Cuñaobot”, nuestro robot de combate pilotado por Eduardo Hilario. Aunque solamente hubo tres participantes, la competición estuvo muy reñida ¡y el Cuñaobot acabó completamente destrozado por Scratch (AlexTC) y SuperMecánico (Luis Llamas)!
- También conseguimos el segundo premio en la categoría Laberinto, con nuestro robot DELS (¿Dónde Está La Salida?), la evolución del CRMaze que presentamos el año pasado. El robot que se impuso como ganador fue Teseo de Diego Lale, que gracias a su robusto algoritmo consiguió resolver el laberinto tres veces seguidas.
El ranking oficial se puede consultar en la web de la OSHWDem. También hemos hecho una crónica con mas fotos del viaje a La Coruña.
En resumen, ha sido una experiencia inolvidable con la que hemos aprendido muchísimo, y nos anima a seguir desarrollando robots open-source de todo tipo. Por ahora hemos creado un grupo de trabajo semanal para idear nuevos robots de competición. ¿Interesad@? mándanos un mensaje
-
El CRM vuelve a participar en Robolid... ¡después de 10 años!
Hemos participado en otra competición, esta vez se trata de Robolid 2016, organizada por la Asociación de Microbótica de la Universidad de Valladolid (AMUVa). La última vez que la Universidad Autónoma participó en Robolid ¡fue en 2006! Así que no podíamos dejar pasar esta oportunidad.
En el club ya disponíamos de un robot Velocista, pero de cara a la competición decidimos mejorar el diseño y además construir otro robot capaz de participar en la categoría de Rastreadores (tiene un chasis mas corto para poder hacer mejor los giros). Esto fue posible en el corto plazo que teníamos, gracias a que el diseño de nuestro robot es completamente paramétrico y su estructura está fabricada con una impresora 3D.
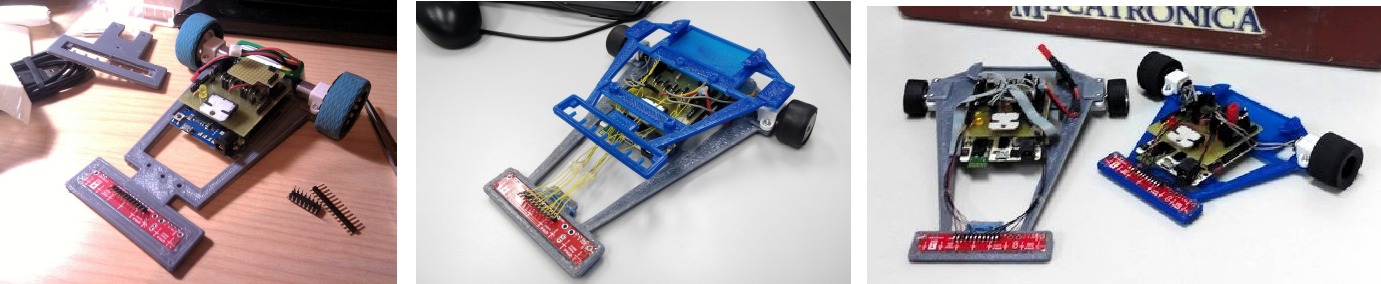
Fases del proceso de diseño del Vector 9000 (velocista) y MiniVector (rastreador) Pensamos que el algoritmo de rastreadores sería sencillo… pero fueron necesarios muchos intentos antes de conseguir detectar correctamente las marcas de giro.
Además, aprovechamos la ocasión de participar en este evento para incluir algunas pegatinas tanto en los robots como en nuestra caja de herramientas, fomentando la visibilidad de la UAM, nuestra escuela politécnica y el club de robótica.



Carlos García y Víctor Uceda con los robots (izquierda), pista oficial de Velocistas (centro) y participación en la pista oficial de la categoría Rastreadores (derecha). En la imagen central, es importante resaltar el puente que hay en el circuito, ya que nos limitó bastante la velocidad.
El nivel resultó ser muy alto este año, y nuestros dos robots se quedaron a las puertas de la clasificación en ambas categorías. Nuestro rastreador MiniVector obtuvo la máxima puntuación en cuanto a precisión, pero no consiguió clasificar por tan solo medio segundo de diferencia con el siguiente participante. Aun así la ocasión nos ha servido para hablar con otros constructores e ir mejorando nuestros diseños ¡es como mejor se aprende! Por ejemplo, un problema que queremos solucionar para la siguiente competición es el elevado peso de nuestras baterías. Aunque no hemos logrado obtener puntos de la Liga Nacional de Robótica de Competición (LNRC), aparecemos mencionados en el artículo sobre Robolid 2016 en la web oficial de la LNRC.
-
Reparto de material de frikeo para la semana santa

Este “Viernes Abierto” animamos a todo el mundo a aprovechar las vacaciones de semana santa para frikear y avanzar con los proyectos. Como la universidad está cerrada durante la semana, estuvimos proporcionando a los miembros todo el material que necesitasen tener en casa. Triunfaron las placas MiniBlip y Raspberry Pi 3, pero sin duda el mayor éxito fue… ¡un gatito de 5 días! recién adoptado por Carlos González :-)
Pablo y Carlos estuvieron poniendo a punto una Raspberry Pi original (gracias por cederla Víctor!), que será la que contenga el proyecto de los súper-épicos “desagues musicales”. Pronto lo podréis ver en acción!
En la foto aparecen, de izquierda a derecha: Javier del Valle, Carlos González (con el gatito), Pablo Molins, Cristina Kasner, Guillermo Guridi, Rubén Mínguez y Carlos García
-
Mini-ArduParty del 4 de Marzo
Hoy tuvimos otra ArduParty en la que Carlos García hizo una introducción al uso de sensores y actuadores con Arduino. También presentamos el concepto de controlador PID. Los ejercicios prácticos incluyeron la construcción de un “theremin” (combinando un altavoz con un sensor de distancia) así como la demostración de un robot seguidor de línea. El taller tuvo escasa publicidad debido a un fallo técnico con las pantallas, por lo que se apuntó poca gente (de ahí el “mini”). Por otra parte, la ocasión nos sirvió para comprobar el material disponible, y la respuesta positiva de los asistentes fue muy motivante de cara a futuros talleres.
Además, Carlos y Miguel A. (uno de los alumnos) pusieron a prueba las recién llegadas RaspberryPi 3. Son unas placas capaces de ejecutar un sistema operativo, es decir, son perfectas para desarrollar proyectos que requieren alta potencia (de hecho, la interfaz gráfica de Raspbian resulta ser mas fluida que la del ordenador actual del club de robótica :P).
Hemos adquirido cuatro de estas placas, con la idea de utilizarlas en proyectos de robots móviles que utilicen algoritmos de visión artificial. Una va a ir destinada al proyecto del cuadricóptero, y otra irá en nuestro coche RC, quedando dos placas libres para cacharrear. ¿Te interesa la RaspberryPi 3? ¡Visítanos y pruébala!
-
Diseño e impresión 3D en el Viernes Abierto
El 19 de Febrero fue el tercer viernes abierto del Club de Robótica en 2016. Los temas del día fueron el diseño y la impresión 3D. Pudimos mostrar nuestra impresora 3D en funcionamiento gracias a las mejoras implementadas por Víctor, Cris, Rual y Rubén (ahora la impresora dispone de un ventilador de capa con control de velocidad, además de utilizar filamento de 1.75mm en vez de 3mm).
Por otro lado, Víctor ha comenzado la restauración del robot velocista “Véctor9000” (repositorio en GitHub). Hemos decidido volver a lo más simple, usando un único array frontal de 8 sensores de línea (para ello se han eliminado el multiplexor y el array secundario de sensores CNY-70). Además, ahora dispone de telemetría por Bluetooth, ya que se ha reemplazado el Arduino UNO con una placa BQ ZUM. Todo apunta a que gracias a éste robot podremos participar de nuevo en las próximas competiciones nacionales :-)
-
Robots de carreras en el T3chfest UC3M
Estos días hemos asistido al T3chfest UC3M. Además de las charlas y talleres nos ha interesado especialmente la competición de robots de carreras, una de las primeras de España. La categoría de carreras se ha incorporado muy recientemente a la Liga Nacional de Robótica de Competición, pero ya está siendo todo un éxito entre el público.
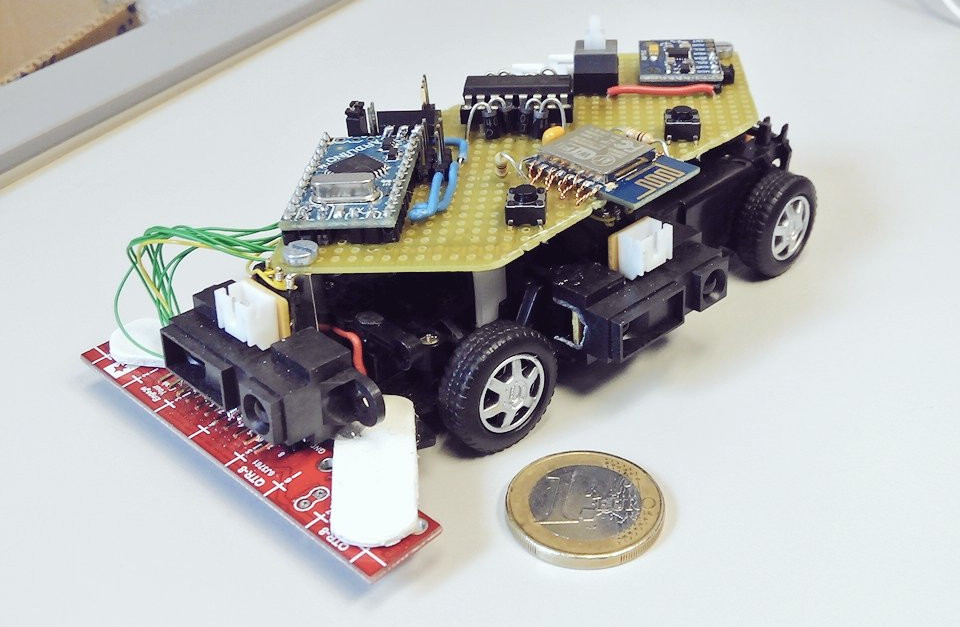
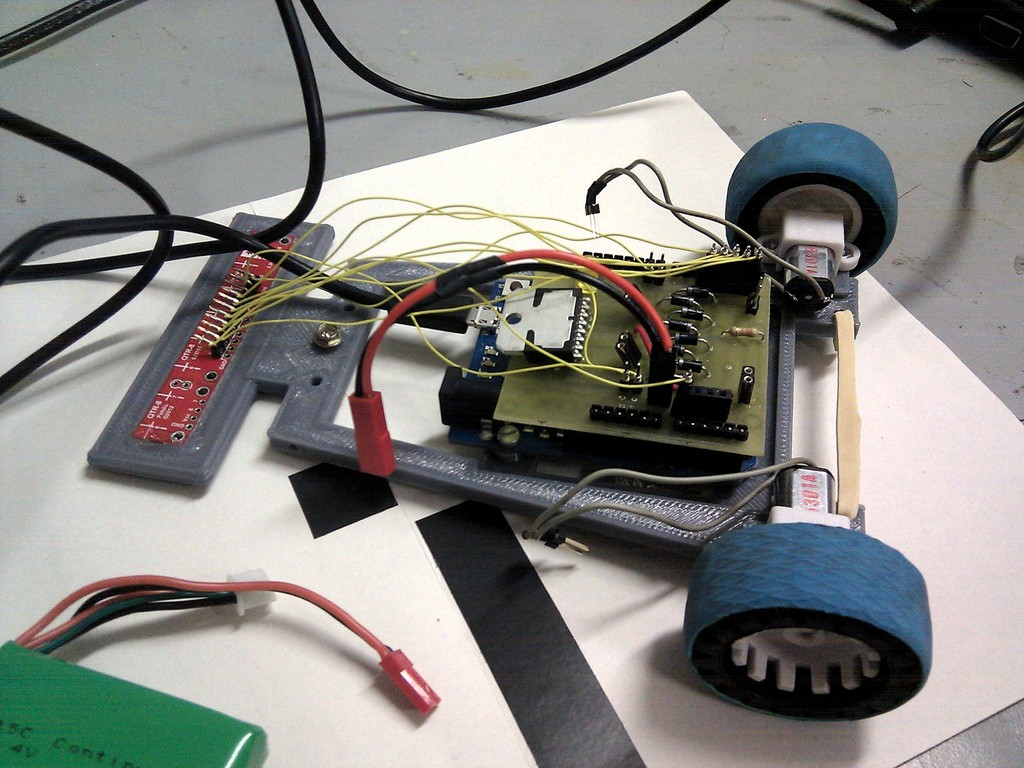
Que no os engañen las apariencias, se trata de una competición muy distinta de los siguelíneas o velocistas a los que estamos acostumbrados: ¡ya que todos los robots compiten a la vez, y se permiten los adelantamientos! El robot de la derecha es nuestro primer intento de robot de carreras, “Vectorcillo”, lleva sensores de obstáculos frontales y laterales, para detectar y esquivar a otros robots. Desafortunadamente no ha llegado a participar debido a fallos en el sistema de dirección. Una pena, porque está basado en un coche de juguete reciclado, y nos encanta el reciclaje tecnológico :-)
Recomendamos ver el magnífico vídeo resumen de RoboticSpot, y también este vídeo de Puma Pride con interesantes planos a cámara lenta.
-
"Viernes abierto" del 5 de Febrero
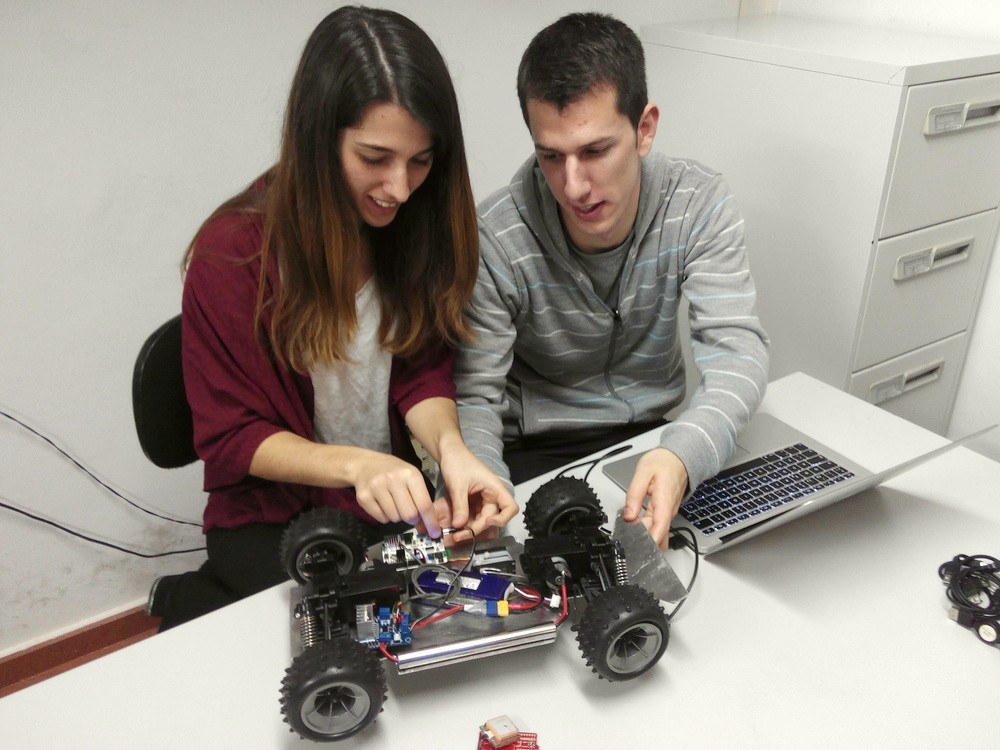
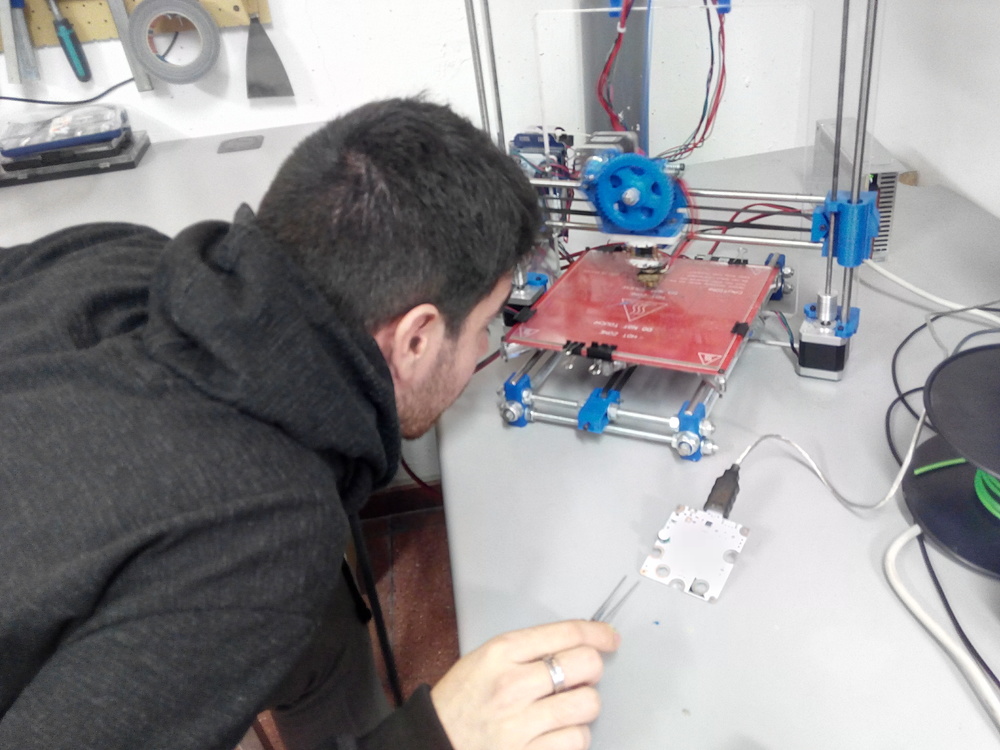
Este viernes volvimos a ofrecer a los visitantes la iniciación con placas MiniBlip. Pero además fue el comienzo oficial del proyecto del coche autónomo (hilo en la lista de correo). La idea es restaurar una base de coche radio-control que había por el local, para automatizar su control con arduino/raspberryPi y sensores GPS, ultrasonidos, una cámara… etc ¡Cualquier colaboración es bienvenida!
Además, Rual consiguió solucionar un problema bastante complejo de drivers de Lubuntu en el ordenador del local. Por fin podemos usar programas que necesitan aceleración gráfica (Cura, la tarjeta de captura de vídeo, etc) ¡Gracias Rual!
-
Global Robot Expo 2016

Hemos asistido a la Global Robot Expo 2016, que tuvo lugar en el Pabellón de Cristal de la Casa de Campo (Madrid). Fuimos principalmente para ver las competiciones de Minisumo y Humanoides y así poder hablar con otros constructores. Sacamos un vídeo de la competición de minisumo, donde se aprecia el buen ambiente que había durante el evento.

En la Global Robot Expo también había multitud de stands, donde sin duda el principal reclamo fueron los drones, tanto de juguete como industriales. Prácticamente todos los stand tenían al menos un dron.
Por ello no podía faltar una competición de drones de carreras, que ha sido una de las primeras en España. Puedes ver un vídeo aquí.
Otro de los stand presentaba un exoesqueleto para ayudar a personas con movilidad reducida. Nuestro compañero Víctor pudo probarlo y verificar su funcionamiento :-)
-
Programación con MiniBlip en el Viernes Abierto
El 22 de Enero tuvimos el primer “viernes abierto” del Club de Robótica. El tema del día fue la programación con placas MiniBlip. Las MiniBlip son placas basadas en arquitectura ARM, que pueden programarse para: dibujar patrones de luces, leer sensores, generar música, emular dispositivos USB (ratón, teclado, micrófono), etc.


Tuvimos actividad desde las 15h hasta las 19:30h, y se hicieron programas muy chulos (teniendo en cuenta que era la primera vez que disponíamos de estas placas). Breve vídeo mostrando los programas
Enlaces de interés:
-
Feria de las Asociaciones de la UAM
Este año hemos podido participar en la Feria de las Asociaciones, que fue organizada el 15 de Diciembre de 2015 por la Oficina de Atención al Estudiante (OAE). Nuestro stand estuvo situado en el hall de la Escuela Politécnica Superior, junto a las asociaciones AET, DEISI, y UamNet, entre otras.

Podemos decir que la presencia del CRM fue todo un éxito, ya que se dio a conocer la asociación a mucha gente; los robots y la impresora 3D atrajeron a multitud de estudiantes y profesores. Desde aquí queremos agradecer a todos nuestros miembros su gran implicación a lo largo de toda la jornada. Vídeo de nuestro stand
-
Participamos en la V jornada GMV de robótica
El 26 de Noviembre asistimos desde el Club de Robótica al evento que tuvo lugar en la sede oficial de GMV, situada en Tres Cantos. Allí se realizaron demostraciones en directo de los robots Foxiris (para monitorización de plantas oil & gas), MiR100 (un robot de exploración de tipo rover) y Aunav (un robot enorme usado para la desactivación de explosivos). Noticia en la web de GMV
Además participamos en el concurso “Concurrent Design Facility (CDF) for Robotics” en el que se nos asignó la tarea de diseñar un robot para la monitorización de plantas oil & gas en menos de tres horas. Obtuvimos el primer premio junto con estudiantes de la UPM.

Demostración de los robots Foxiris de GMV (izquierda), MiR100 de Robotplus (al fondo) y Aunav de Proytecsa (derecha).
Fila superior: Carlos Crespo (GMV), Carlos García (CRM-UAM), Sergio Martini (GMV), Alberto Medina (GMV), Pedro Hernández (Repsol), Gonzalo Díaz (UPM) y Víctor Uceda (CRM-UAM)
Fila inferior: Luis Paarup, David Matilla, Javier Fernández, Stefan y Pablo Rodríguez -ausente en la foto- (todos de la UPM)
Desde aquí queremos dar las gracias a los profesores Fernando J. López-Colino y David González Arjona, por hacernos llegar este evento y animarnos a participar.
-
Concurso de resolución de laberintos en la OSHWDem 2015
La OSHWDem (Open Source Hardware Demonstration) es un evento que se realiza anualmente en A Coruña. Allí se reúnen multitud de frikis de diversas disciplinas, y entre otras cosas se organizan competiciones de robótica.

Víctor y Carlos con el robot CRMaze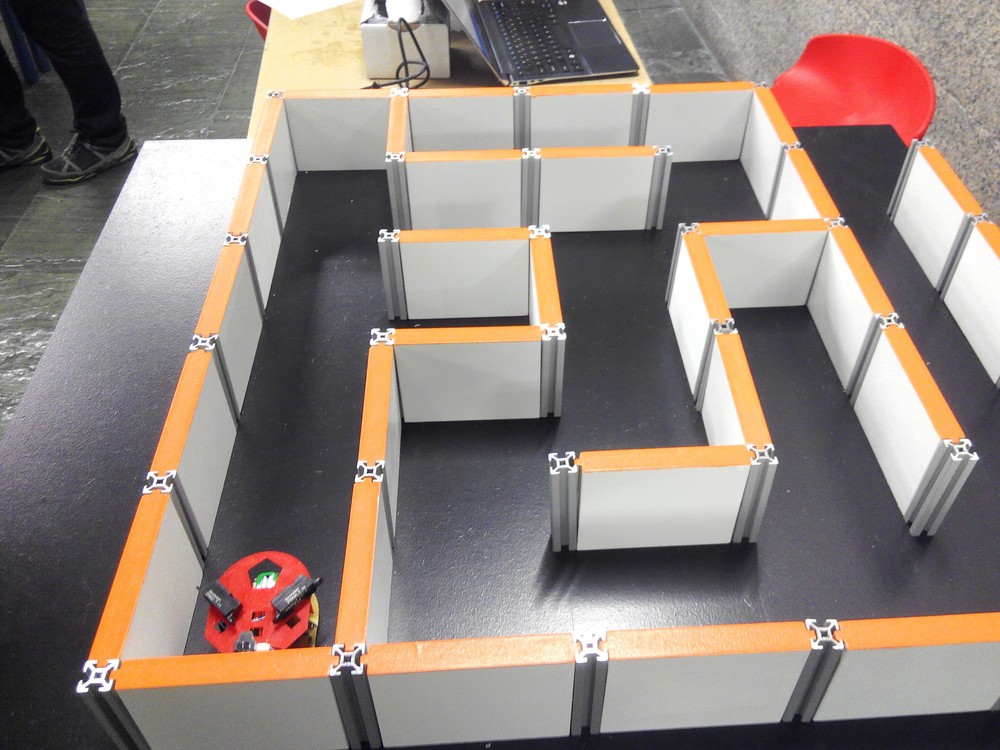
Calibración del robot en el laberinto oficialÉste año nos propusimos presentar un robot al concurso de resolución de laberintos (también conocido como “micromouse”). Fue todo un reto porque tan sólo tuvimos dos semanas para construir el robot y programar los algoritmos necesarios. El resultado fue el robot CRMaze.
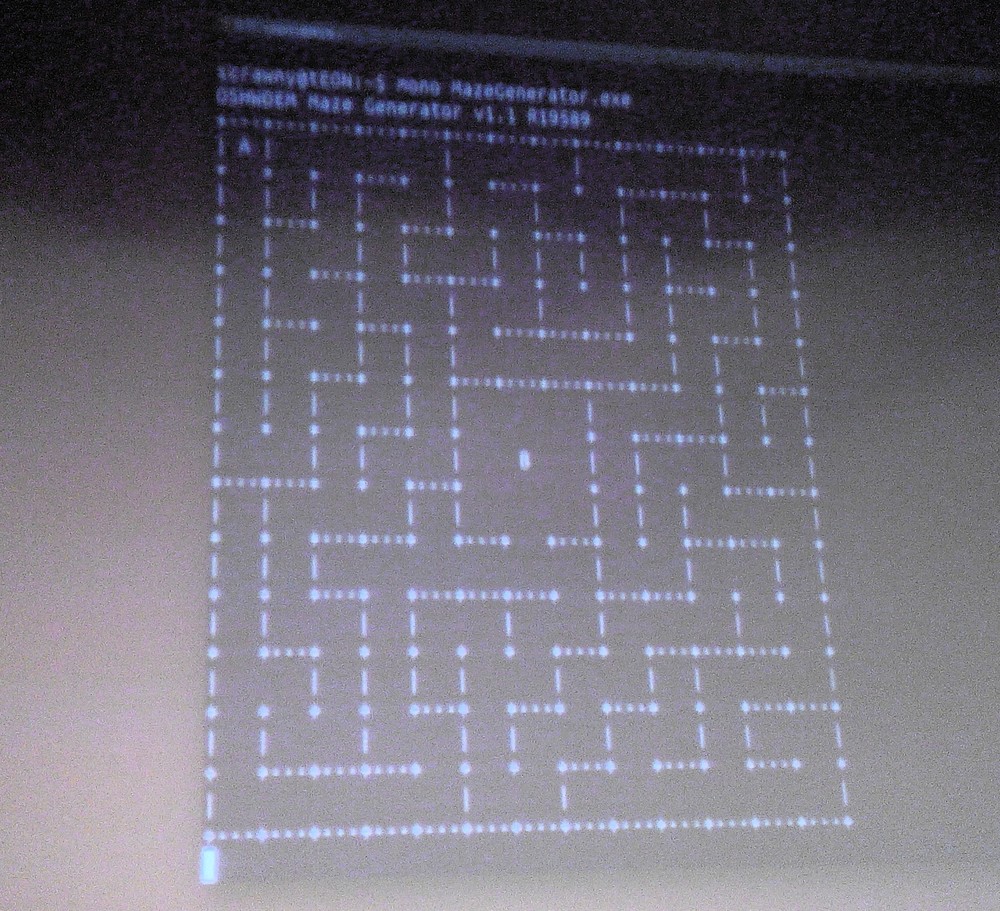
El laberinto a resolver fue generado aleatoriamente
Montaje "in-situ" del recorrido
Aunque ninguno de los participantes fue capaz de resolver el laberinto debido a su alta complejidad, fue una experiencia muy interesante y todos aprendimos mucho. Además nos dieron un trofeo muy chulo impreso en 3D con filamentos de cobre y bronce.

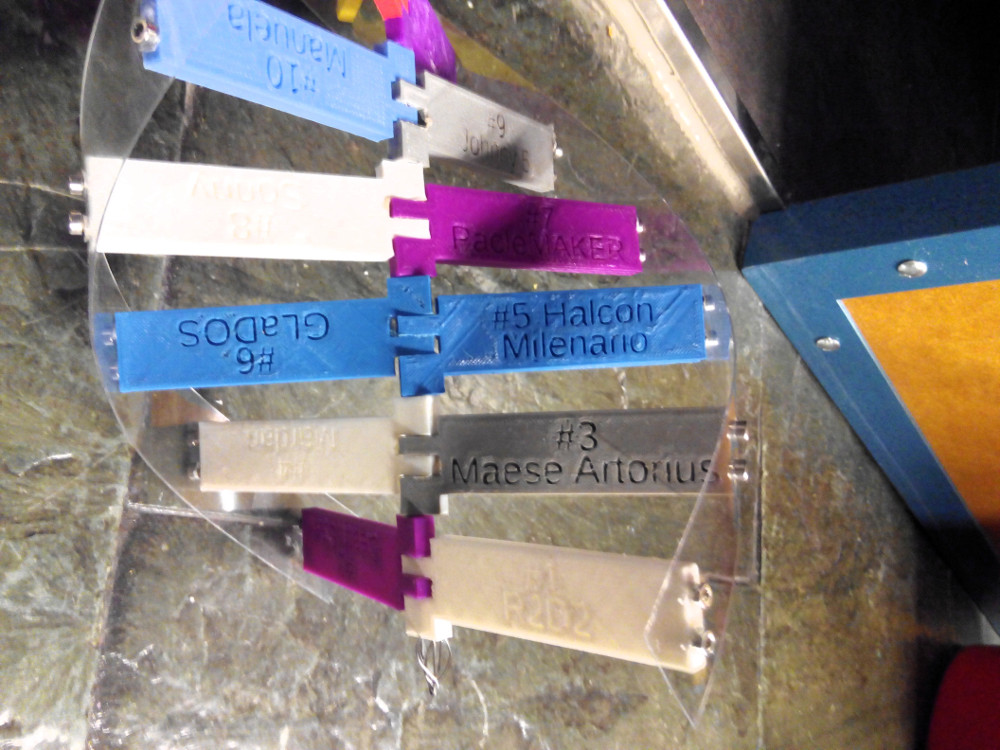
También participamos en el reto “ADN CloneWars”. En él se imprimieron más de 500 piezas para construir una cadena de ADN con los nombres de todas las impresoras open-source construidas en España dentro del grupo RepRap Clone Wars.
El Club de Robótica forma una parte importante de la cadena ya que el clon Nº5, “Halcón Milenario”, fue construido en 2012 en el local de la asociación. foto de nuestro pruseótido
Para el año que viene nos hemos propuesto mejorar el diseño del CRMaze para conseguir resolver el laberinto por fin, y además queremos crear equipos que participen en otros concursos dentro de la OSHWDem (seguidores de línea, robots de sumo y de combate). ¿Interesad@? mándanos un mensaje
-
Vuelve a funcionar la URL institucional
Desde hoy ya es posible encontrar nuestra web accediendo a:
http://crm.ii.uam.es/La redirección se efectúa gracias al repositorio: https://github.com/CRM-UAM/redirect
-
¡Estrenamos nueva web!
Tras un tiempo inactivo, ¡el Club de Robótica vuelve a la carga!
¿Por qué no le echas un ojo a los enlaces de la portada?
{kind=link}
{kind=link}
{kind=link}
Añádenos a tu lector RSS