|
|
|
Participación de Cube Revolutions en el concurso nacional de robots HISPABOT 2004. UAH. Alcalá de Henares, Abril 2004. |
|
|
Título: “El Robot Ápoco Cube Revolutions”
Actividad: Participación en la Prueba Libre..
Duración: 15 minutos
Evento: HISPABOT 2004. Concurso Nacional de Robots.
Organiza: Departamento de Electrónica
Lugar: Escuela Politécnica. Universidad de Alcalá (UAH).
Fecha: 29 de Abril de 2004
Ponentes:
Cube Revolutions es un robot ápodo (sin patas) que se desplaza de manera similar a cómo lo hacen los gusanos de seda.Está constituido por 8 módulos iguales (Módulos Y1) conectados con la misma orientación, por lo que se desplaza en línea recta, hacia adelante o hacia atrás. Los módulos Y1 se pueden conectar rotados 90 grados uno con respecto al anterior, pudiéndose construir robots ápodos capaces de desplazarse por un plano, y no sólo en línea recta.Tanto la electrónica como la alimentación se encuentran situados fuera del robot y la generación del movimiento se hace a través de un PC, conectado por el puerto serie (RS-232). Este tipo de robots pueden adoptar diferentes formas lo que los hace especialmente interesantes para desplazarse por zonas con muchos “recovecos”, donde otros robots no podrían llegar. La locomoción se realiza aplicando ondas que se desplazan desde la cola hasta la cabeza. Variando el tipo de onda y sus parámetros: amplitud y longitud, se consiguen diferentes estilos de locomoción. Se trata de un robot Abierto, todos sus planos, la electrónica y el software están disponibles, concediéndose permisos para su uso, modificación, distribución y redistribución de las modificaciones.
|
|
cube-rev1.mpg (2.4MB) |
Explicación de Cube Revolutions y las diferentes configuraciones e los módulos Y1 |
|---|---|---|
|
|
cube-rev2.mpg (4.8MB) |
Cube Revolutions adoptando diferentes formas |
|
|
cube-rev3.mpg (9.1MB) |
Diferentes formas de desplazarse mediante ondas sinusoidales y semiondas |
|
|
cube-rev4.mpg (1.7MB) |
Cube Revolutions moviéndose en configuración de rueda |
|
|
|
|
Descargas |
|
hispabot-04-cube-revolutions.sxi (2,0 MB) |
Presentación para OpenOffice 1.1.3 |
|
hispabot-04-cube-revolutions.pdf (740KB) |
Presentación en PDF |
|
poster_cube_rev.sxi (306KB) |
Poster de Cube Revolutions, enviado para su participación. Para OpenOffice 1.1.3 |
|
poster_cube_rev.pdf (290KB) |
Poster en PDF |
|
cube-rev1.mpg (2.4MB) |
Vídeo 1: Explicación de Cube Revolutions y las diferentes configuraciones e los módulos Y1 |
|
cube-rev2.mpg (4.8MB) |
Vídeo 2: Cube Revolutions adoptando diferentes formas |
|
cube-rev3.mpg (9.1MB) |
Vídeo 3: Diferentes formas de desplazarse mediante ondas sinusoidales y semiondas |
|
cube-rev4.mpg (1.7MB) |
Vídeo 4: Cube Revolutions moviéndose como una rueda |
Se condecen permisos para usar, modificar y/o distribuir esta presentación, siempre que se mantenga esta nota.
Página de Cube Revolutions.
Robot ápodo Cube Reloaded (Versión anterior a Cube Revolutions)
Aplicación libre QCAD, para diseño en 2D. Disponible en Debian (apt-get install qcad)
Aplicación libre Blender, para diseño en 3D. Disponible en Debian (apt-get install blender)
Librerías gráficas GTK
Mi intención inicial en HISPABOT 2004 era el enviar un artículo al Seminario, como ya hice en el 2003, con un artículo sobre la tarjeta JPS , una entrenadora libre para FPGA. Sin embargo, en el 2004 no se organizó este seminario. Como para esas fechas tenía la primera versión de Cube Revolutions, quería mostrarlo a la gente, así que decidí participar en la prueba Libre.
El concurso de realizó en la Escuela Politécnica de la Universidad de Alcalá, el mismo lugar que en las ediciones pasadas.
|
|
|
Del Club de Robótica-Mecatrónica (CRM) de la UAM fuimos 4 grupos:
Zapatitos: Daniel Álvarez y Alberto Calvo, con el robot Queen Mary en la categoría de Rastreadores. Tenían pensado inscribir al robot cuadrúpedo Zapatitos en la prueba libre, sin embargo, por falta de tiempo a última hora no lo presentaron.
Papón: Daniel de Castro, Manual García-Herranz, Juan Antonio García y Ángel José Lera, que presentaron el robot Papón en la prueba del Laberinto. Se clasificaron para la fase final.
MundoBot: Alejandro Alonso, con el robot Hexápodo Melanie, en la prueba Libre. Alejandro no pertenece al CRM pero se inscribió para participar a través de él. Sólo se puede acceder a Hispabot a través de uno de sus centros asociados, y uno de ellos es el CRM de la UAM. Melanie fue el primer clasificado.
IEARobotics: Y yo (Juan González) presenté a Cube Revolutions en la prueba libre. Quedé segundo clasificado.
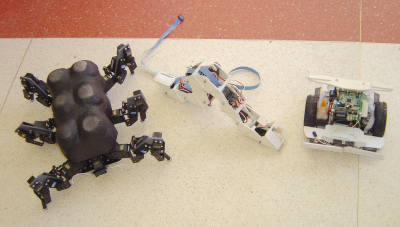
En la foto de la izquierda están Dani y Alberto haciendo los últimos retoques a Queen Mary. En la derecha estamos Alejandro, el grupo Papón, Ramón y Cristina que se pasaron para ver el concurso (ellos participaron el año anterior, también en la prueba libre) y yo. En la parte inferior de la foto se ven los robots robot Hexápodo Melanie , Cube Revolutions y Papón.
|
|
|
En Hipabot pude conocer personalmente a Jose Pichardo, del grupo UCABOT de la Universidad de Cádiz. Ya nos conocíamos “electrónicamente” y habíamos hablado por teléfono, pero nunca nos habíamos visto en persona. Fue una gran alegría :-) Me presentó al resto de componentes de UCABOT.
|
|
|
En la foto de la izquierda están Dani y Alberto, hablando con Arturo Morgado, el Subdirector de investigación de la Escuela de Ingeniería de Cádiz, que venía a concursar con el grupo UCABOT. En la derecha está Alberto haciendo pruebas con Queen Mary.
|
|
|
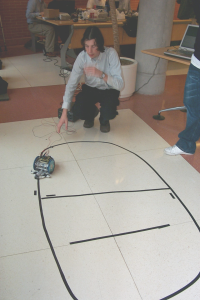
La prueba libre se celebró el Jueves 29 de Abril, por la tarde. En la foto de la izquierda estamos Alejandro y yo, una hora antes de la prueba. Parece que estamos muy tranquilos, pero todo lo contrario. ¡Estábamos de los nervios! :-) Siempre que se hacen demostraciones de robots en público hay muchos nervios. ¿Y si de repente los robots dejan de funcionar?. En la foto de la derecha estoy explicando a Cube Revolutions.
|
|
|
Todo salió bien, tanto Alejandro como yo no tuvimos problemas. La gente apludió mucho. Parece que nuestros robots gustaron :-). Melanie ganó el primer premio y Cube Revolutions el segundo. ¡¡Mejor no nos podía haber salido!! :-). En la foto de abajo estamos Alejandro y yo recogiendo el premio al día siguiente.
|
|
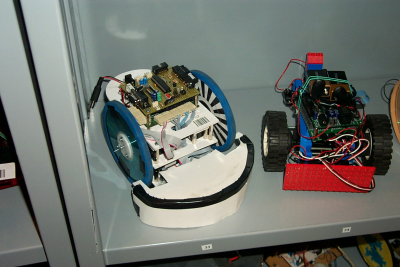
En la izquierda se puede ver a Queen Mary (robot blanco) y en la foto de la derecha el resto de robots que participaron en representación del CRM de la UAM: Melanie, Cube Revolutions y Papón.
|
|
|
A toda la gente implicada en la organización de Hispabot. Este tipo de eventos son los que fomentan la robótica. ¡Muchas gracias!
1/Enero/2006: Añadidos enlaces a Cube Revolutions
23/Mayo/2005: Publicada información en esta web. Con mucho retraso, lo sé ;-)